近日,我院师生在行人与应急疏散动力学领域取得新进展,相关成果分别发表于安全科学领域权威期刊《Safety Science》和非线性科学领域权威期刊《Chaos, Solitons and Fractals》上。

突破斜坡模拟瓶颈:基于微观步态的双足社会力模型
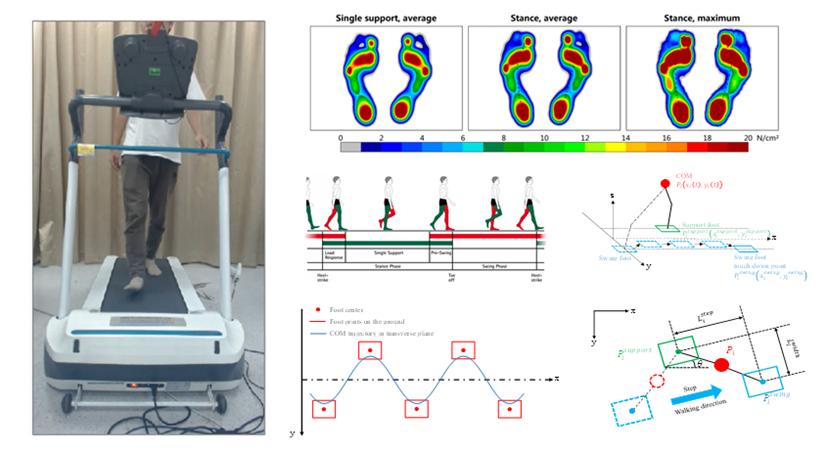
谢玮副研究员(第一作者)、田兵伟副教授(通讯作者)发表于《Safety Science》的研究,首次提出了融合生物力学特征的双足步态社会力模型,通过将行人运动分解为质心和步态运动,实现了斜坡约束下的人群动力学精细化模拟,系统揭示了坡度对行人步长、步速等关键步态参数的影响规律。我国多山地和丘陵的地理条件造就了不同的斜坡地形,研究成果对于预防类似韩国梨泰院斜坡人群踩踏事故、提升复杂山地环境下的应急疏散效率具有重要意义。
揭示迎面避碰逻辑:基于成本收益的动态决策框架
我院在读博士生宣陈锐(第一作者)、谢玮副研究员(通讯作者)发表于《Chaos, Solitons and Fractals》的研究,通过一系列可控实验揭示了行人冲突避让的关键机制。团队创新性地提出了“预判-行动-调整-恢复”四阶段避碰理论模型,并构建了基于成本收益(NPV)的决策分析框架。研究发现,行人的避碰决策始终以安全需求为核心,当主动避碰的边际收益降为零时,行人的策略会从“积累安全余量”转向“能量节约”模式。这一实验发现从本质机理上量化解释了人类避碰行为决策的内在机理。研究成果对于解决行人运动方向冲突、提高疏散效率具有重要意义。

上述两项研究完善了行人与疏散动力学理论体系,为灾害场景下的人群应急疏散与复杂建筑的疏散路径规划提供了科学依据。
原文链接:
https://doi.org/10.1016/j.ssci.2026.107119
https://doi.org/10.1016/j.chaos.2026.118126





